|
|
| Reader Projects | [ Home ] [ Contact ] [ Search ] |
|
|
Walker ImprovementsTom Gray (see below) has been a busy man. He's taken his breadboarded parts from below, and turned them into the following minisumo. Although cool, it wasn't cool enough, so these pics are now of just a memory of a 'bot. The parts have gone into a more advanced version.
We were recently made aware of this cool post at GoRobotics.net for modifications to the Walker project. Zac Soden has added a "climb sensor", added in left and right turn sensors, and light-seeking behavior. Nice job, Zac!!
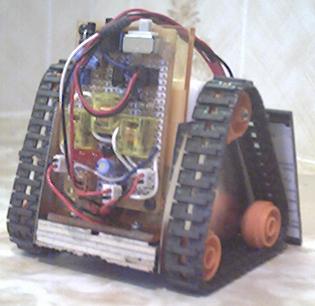
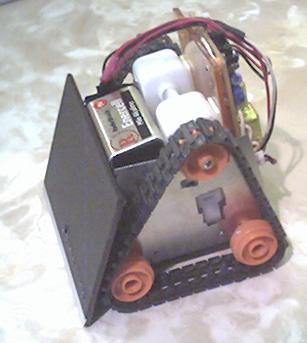
Single Pole Relay MiniSumo
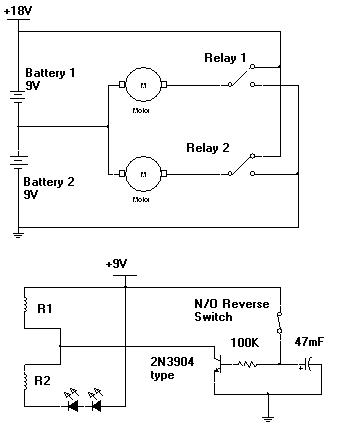
Tom Gray is a member of the BEAM mailing list who couldn't find any double-pole double-throw relays for his minisumo project. Well, necessity is the mother of invention, so Tom came up with this modification for using the single-pole relays he had on hand. Here's his text: For those wanting to try the Junkbots minisumo but unable to find DPDT relays, here is an alternative. When I went to build this project, I found that all I had on hand were two 24V DPDT relays and a bunch of SPDT relays. Didn't want to take apart my recently completed herbie or faxwalker... As Bruce R. said a while ago, putting bits of circuits together can give new results. The attached circuit uses SPDT relays, the two-battery reverse from Jerome Demers' beetlebot, the backup timer from the Junkbots Herbie project, all combined with the 'back and turn' diodes from the Junkbots minisumo. As built on a test platform (photo), the circuit works quite well. With the values shown, it reverses 10 cm, turns 180 degrees then goes forward. As I have it hooked up, one battery provides forward motion and the other battery does reverse. The 'back and turn' circuit runs off the reversing battery, leaving the forward battery to use all its juice for pushing the opponent. Originally I had it so that one battery drove the right wheel and the other the left; after a number of reverses, as the reverse circuit drained the battery to which it was attached, one wheel began to slow and the bot would turn. Which may or may not be a bad thing... Here's the Schematic.
Casey (sorry, no surname given) sent us email with pictures of his devices built from the book. Nice job modifying your junk!
|
|||||||||
| [ Home ] [ Contact ] [ Search ] | ||||||||||